

 BACK ON MY FEET
BACK ON MY FEET
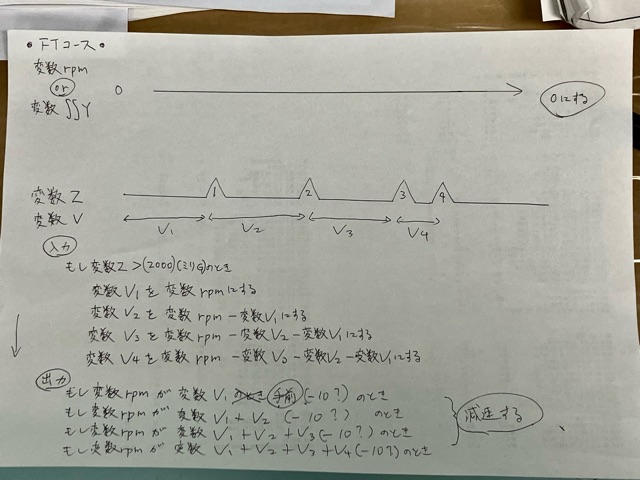

(私はミニ四駆の事なんか何も分かっていなかったのかもしれないし、むしろ知れば知るほど加速度的に訳が分からなくなっていくのかもしれない。少なくともこの世界がそうであるように。) ・タイヤの回転数なんてどうやってカウントするのよ? _:(´ཀ`」 ∠): とりあえず電磁式を試そうかと。ホイールにモーターから取り出した磁石でも取付しておいて、磁気センサーで読み取れば良かろう。上手くできるか神のみぞ知るだが。 ・狙いとしては悪くないかもしれないけど、実際マイクロビットにどうやってコーディングするの?( ̄∀ ̄)いきなり難易度上がったように思えるけど? 確かに多少面倒かもしれないが、このメモの通りならいけると思う。AIミニ四駆FT大会コースを想定するなら、JCJCにドラゴンバック0着が組み込まれたコースだろ?3周でドラゴンバック3回とLC1回。それで1セットになる。まずはこの位置関係を速度を落として学習していくとする。 ・そうね。多少の誤差はあっても基本はそれの繰り返しになるわけね。 スタート位置をゼロとして、タイヤの回転数をカウントしていく。これは加速度センサーのY軸の値をローパスフィルターでなだらかにした後、重力加速度の影響を補正した値を2回積分した値でも良い。変数Rとしよう。 そして加速度Z軸の値が大きくマイナス側に振れるか、逆に0やプラスに転じた時の回転数を変数...ここではVとしたら、1セットでV1からV4まで4つセットする。この変数Vはセクションの数以上を準備する必要があるが、学習用コードは...。 もし変数Z(加速度Z補正値)が〇〇以上(ないし以下)のとき 変数V1を変数Rにする 変数V2を変数R-変数V1にする 変数V3を変数R-変数V2-変数V1にする 変数V4を変数R-変数V3-変数V2-変数V1にする ....(以下同様) これで1セット分のセクションの位置関係を記録できる。そして変数Rを0に戻す必要があるが、仮に次の山をV5としておいて、V5-V1をコース全長として扱えば良いと思う。 ・本番では変数Vから手前でブレーキをかけたい分を引いておいて、それぞれを足し合わせていけば良い訳ね(⌒▽⌒) 変数Rが変数V1(-α)のとき減速する 変数Rが変数V1+変数V2(-α)のとき減速する ...(以下略) となるか。
2023/10/27 00:42:01







