

 Turn your magic circuit
Turn your magic circuit
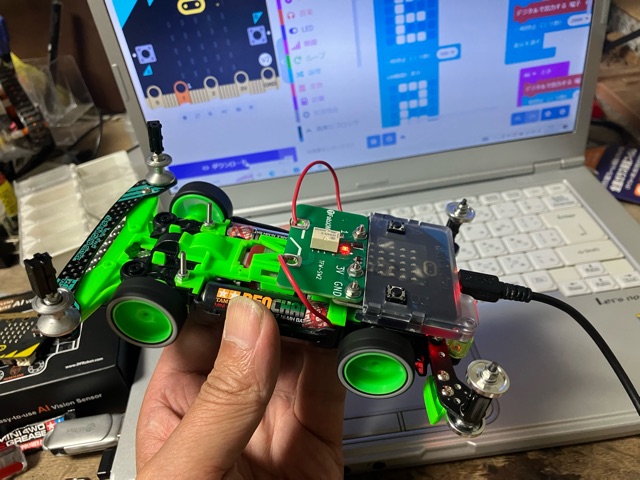


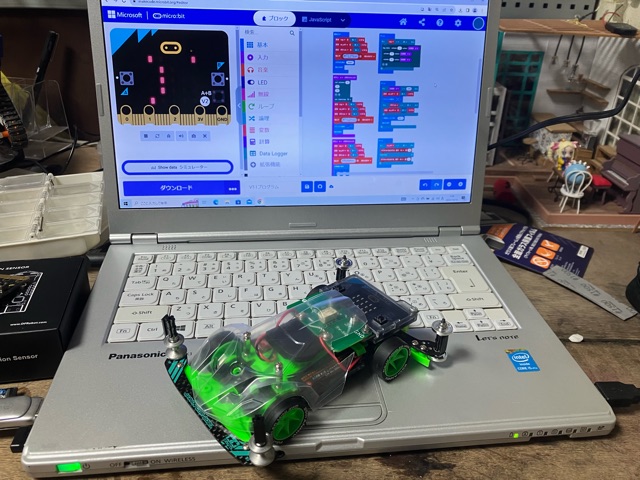
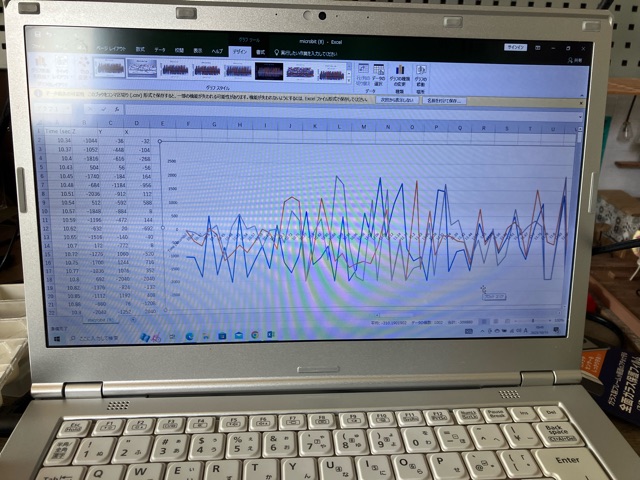





(ひとまずマッハダッシュを積んでもマグネットリレーが問題なく作動して、回路が発熱したり、モーターが十分に回る事は確認できたのでホッとしたところであったが...。) ・上手くいったようね^_^ まぁな。とりあえず過電流の問題は心配なかったようだ。PWM制御は捨ててもマグネットリレーを選んだからかもしれんが。 ・アレ?しれっとマイクロビットはv2の方に変更したのね( ̄∀ ̄) よくよく調べたらv2はデータログ機能も追加されているらしいからな。これは衝撃的だぞ。今までは目視だし、当欄でもよくやっていたけどスロー動画撮って挙動を確かめるみたいな。 だけどそれが生値で出てくるのよ。もうコレは客観が主観に変わったぐらいの衝撃で...。 ・データは客観的証拠じゃないの? まぁ、そうだけども。いや、勘違いかもしれんが、「ミニ四駆にとっての主人はレーサーなのだからレーサー目線は客観的。ミニ四駆のセンサーから得られる情報はどっちかといえば主観的なのでは?」 ・どっちでも良いわ(;´д`) まぁ、現実そうだけどな...。哲学はこういう所で倒錯が起きてないか考える学問ではあるな。コペルニクス的転回とかそうやん。 ・能書は良いとして、ちゃんとコーディングできた? まぁ、割と。マシンも走れるぐらいにはなってるし、データも取れたけれども。 ・めちゃ早くない??_:(´ཀ`」 ∠):急にどうしたん? なんか、復帰して間もないぐらいの頃みたいな(笑)でも久しぶりに何だか楽しいわ。「自分で何でもできるんだ!!」っていう背伸び感がハンパない。 ・ノイズ対策もOK? ノイズキラーコンデンサーだろ?とりあえず50V0.1μFのコンデンサーをモーターに3つ付けてる。ターミナルの接点を邪魔しないように大回しにするのが面倒だったけどな。 ・いきなりマッハですか?_:(´ཀ`」 ∠): 回路の耐久テスト兼ねて。こういうのはトップから下ろしていくのが基本やろ? ・ミニ四駆は徐々にスピード上げていくのが基本じゃなくて? 私はそう思わないし。カント曰くはトップダウンで攻めた方が必ず一手早い。ボトムアップだと問題にぶち当たるのが遅れるからな。懐疑論は慎重派でもあるけれども。 ・そんなのどっちでも良くね?(;´д`)
2023/10/15 20:17:43







