

This parts is registered in1people
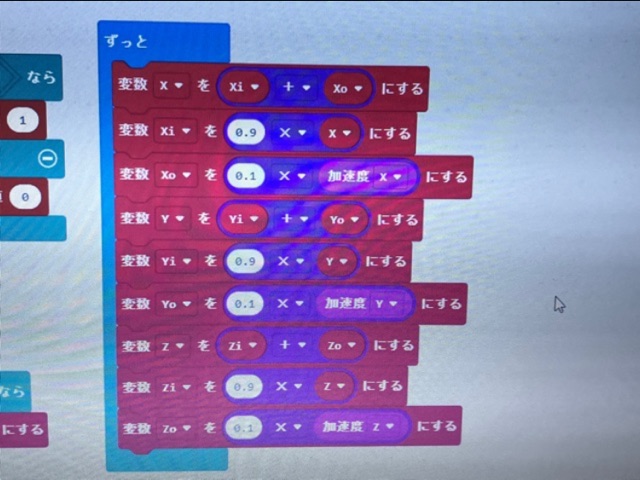
コードをパーツ扱いしても良いかどうかはこの際置いておいて、アナログの(抵抗とコンデンサーで作る)ローパスフィルターと効果は同じ差分方式のフィルタープログラムである。 出力値 = a * ひとつ前の出力値 + (1-a) * センサの値 (係数aは任意。小さいほど追従性が良くなり、大きいほどフィルター効果が大きくなるが、通常は0.8〜0.9ぐらいのようだ。) MakeCodeでコーディングする時は例えば加速度Zを直接制御に使ったり、ログデータにするのではなく、以下のような演算を組んでおいて、加速度Zの代わりに変数zを制御やログに組込めば良い。 変数zを変数zi+変数zoにする 変数ziを0.9×変数zにする 変数zoを0.1×加速度Zにする Rev.1) 現実的に加速度センサーを地面と水平に置く事が困難なため、X軸Y軸にも重力加速度がわずかに付帯する。 加速度を積分して速度、および自己位置を推定する際はこれが大きな誤差となってくるため、今度はハイパスフィルターでこれを除外する必要がある。 ここでは簡単に不感帯を設けて対応とする。 上記コードに続けて例えば もし-100≧変数yまたは変数y≧100なら 変数yhを変数yにする でなければ 変数yhを0にする として変数yhを加速度yの生値の代わりに使用すれば良い。この不感帯は2〜10%(20〜100)ぐらいが適当と思われる。
2023/12/03 13:46:16







