

 Hello Meow
Hello Meow
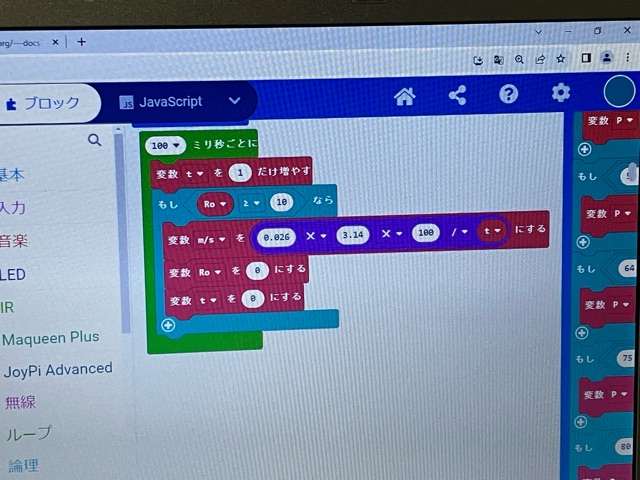


(別にカント先生でなくても、うつむき加減の生徒を見かけては「(若いうちの経験はアテにならないから)自分の直観を信じなさい。」という事が前回の理屈になるのであるが、更には"経験に依らない叡智は存在するのか?"という所まで踏み込む事になる。 カントと言えばこういったアナロジーというか、アンチノミーが得意なのであるが、特殊解法を用いた事はあまり知られていない。「アンチノミーA/Bは必ずAB/BAとなる」のであり、これが恐らくコペルニクス的転回と呼ばれているものである。例えば、機械のような人間と、人間のような機械(すなわちAI)のように。ならばまだまだ未発達のAIに、我々はどう囁くべきか?だ。) まぁ、どうやって速度を捉えるべきか、あらゆる可能性を試そうと思ってコーディングを見直しているんだけどさ。 ・そう言えば前回の走行は速度すら参照してなかったものね。(´∀`=)コリャ タイヤ回転数から速度を割り出すのは簡単だし確実だろう。ただしタイムラグは必ず生ずるからな。フィードバック制御って奴だ。 ・コーディングの例は色々考えられるけれど、時間をt、タイヤ回転数をRo、タイヤ径を26mm、速度をm/sとしたら...。^_^ 100ミリ秒ごとに 変数tを1だけ増やす もしRo≧10なら 変数m/sを0.026×3.14×10/0.1×tにする 変数tを0にする 変数Roを0にする 確かにそれでいけるが、タイヤ10回転ごとの時間を計測する訳だろ。タイヤ10回転って言ったらストレート1枚半だから、やっぱりラグは気になるな。 ・なら加速度を積分するのが正攻法な訳?( ̄∇ ̄)すごくタイヘンだって言ってたじゃん。 そうなんだけどなぁ。ミニ四駆のとてつもないスピードを考えるとフィードバックがとても追いつかないかもしれない。加速度からのフィードフォワードが必要不可欠かもなってね。計測ではなく予測する訳だが。 ・加速度にローパスフィルターを適用している訳だけど、ハイパスフィルターはまだでしょ?(´∀`*) 現実的にマシンを水平に置けないから重力加速度がY軸にも微妙に作用して誤差が出る。ここは不感帯を設けて微妙な影響はカットしてみようかと。 もし変数Y≧100または変数Y≦-100のとき 変数Yhを変数Yにする でなければ 変数Yhを0にする とかね。
2023/11/25 08:18:39






