

 50%50%
50%50%

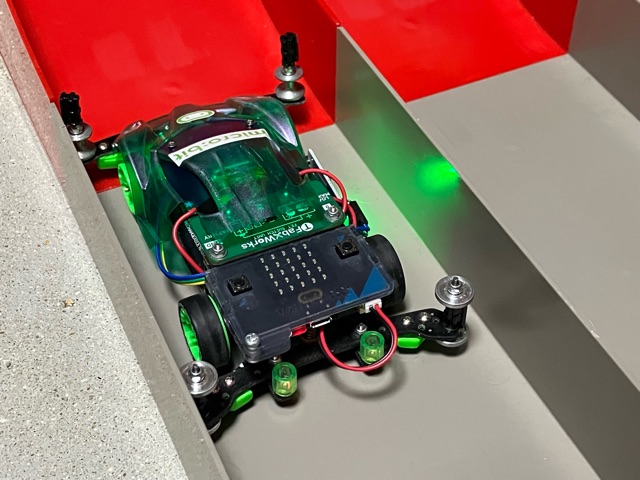






(遂にミニ四駆AIリモート大会公式コースの実走であったが...。) スロープ0着地がめっちゃ難しいんだがこのコース。3周×10セット完走するだけでタイヘン! ・タイムは1分25秒から30秒ってところね...。めっちゃ遅くない?\(//∇//)\ スロープが全然クリアできなくて全体で速度落とした感じだし、シンクロ制御もバラバラでさ(笑)全体的にトロトロ走ったようなカンジになっちゃった。このコースでノンブレ(スポンジブレーキの方)はハンデデカいよ。てか、このコース、素組じゃ完走できない。 ・普通の改造マシンだったらどうなの?( ・∇・) 試しに最近お気に入りのジャドーキング(改造ジャドーエース)にノーマルモーター入れてブレーキギンギンにしてさ、それでも電池垂らした状態でようやく完走したのが1分17秒だった。 ・そう考えると流石、大学の研究チームは速いわね。1分切ったりでしょ?_:(´ཀ`」 ∠): 大会常連の赤坂産業さんの走行動画見てるとスロープ手前で見事にブレーキがかかってんのね。私のマシンはアクセル緩めて減速してるだけだから限界ってのもありそうだな。 ・どうやってブレーキなんかかける訳よ?_:(´ཀ`」 ∠): ショートブレーキってのがあってな。無電圧状態でモーターの電極をショートさせるとモーターの逆起電力でブレーキがかかるらしい。もしくは別にもう1つFETを搭載して逆転方向にほんのちょっと電流かけちゃうとか。もちろんモータードライバーもプログラミングもかなり工夫が必要。 ・想像以上にハイテクじゃん!_:(´ཀ`」 ∠): 現状で上手くタイム上げられないのかしら...。もう普通にスポンジブレーキ貼っちゃうとか? 出力上げてブレーキかけたけれど遅くなった(笑)なんか、余計にシンクロしなくなったカンジな。ブレーキ無い状態でのベストラップは7.5秒ぐらいだったから、それが維持できたら速いが。加速度Z軸で減速させるのは安定しないかもね。むしろ山谷がハッキリ出るX軸を使ってコーナーで加速した方が安定するかもしれん。 ・そんな走り方ありなん?_:(´ཀ`」 ∠): 普通のミニ四駆だったらありえないけどな。 走行動画 https://youtube.com/watch?v=Wv4GXJustjg&feature=shared
2023/11/12 12:29:30








