

 Dive for you
Dive for you

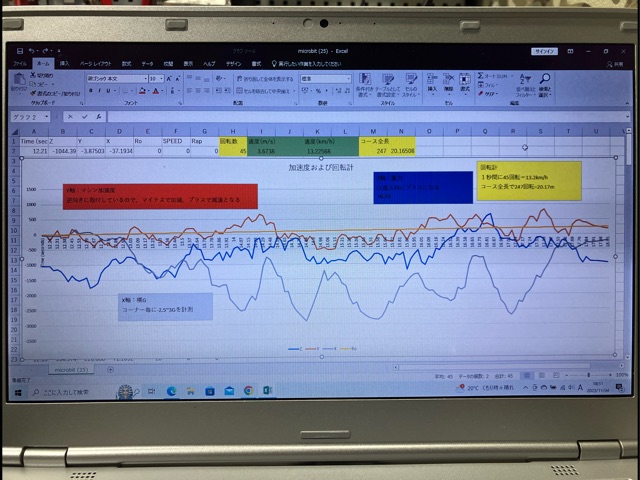


(今回は能書きは置いておき、ドサクサに紛れてマシンが完成してしまったので、レビューする) ・しかもちゃんとJCJCじゃん!^_^ だろ?しっかしイザ広げるとデカいな。部屋の端から端まであるわ。部屋汚いから全体写真は今回は割愛(笑) ・アレ?ボディ載ってないじゃない?(*´-`) これ、一つ問題点が見つかったんだが、ボタン電池だとどうも制御電源の供給が追いつかなくて、ホールセンサー(磁気センサー)が作動しなかったんだよね。で、急遽単4電池2本で制御電源を供給した。 ここは3.7Vの充電式ポリマーリチウム電池に変更が良さげ(どうも一般的らしい) ・マシンの動作としてはどうだったの? 加速度センサーやホールセンサー式の回転計についてはバッチリだったな。ログデータを参照して貰えば分かる。これはもう超速GPの星乃ローラ並みに正確で(笑)コース状況がありありと見て取れる。 因みに他の変更点としたら、モーターはトルクにして、加速度センサーによる速度推定はやめた。その代わりの回転計だが、これが調子良い。かなりの重量感だけども。 ・X軸(横G)が1番ハッキリ出るのね。( ̄∀ ̄)3周でハッキリ6回の山が計測できている。ピークは2.5〜3Gほど。肝心のZ軸(重力)はやっぱりLCでプラス側に振れてピークは+0.7G。回転計による速度推定は13.2km/hほどで、コース全長はタイヤ247回転で20.17mってほぼ完璧なデータ計測じゃない? でしょう?ここで制御を入れようと思ったら加速度Z軸基準で「0以上になったとき」を入れるか、多分それだとブレーキが遅過ぎるからスタートからのタイヤ回転数Roを使って「150<Ro<160のとき」だとかでブレーキポイントを狙い撃ちにすれば良い。もちろん「Ro>247になったらRoを0にする」と入力すれば、そのまま次の周回に入れる。これなら速度を上げても攻略できるだろう。 ・ただ問題は( ̄∀ ̄)...。これらパラメーター「」の手入力をどうやって自動化するかなのよね? もちろんだ。AIはそうじゃなきゃな。それができて自動運転だし、それを何度も何度も繰り返して自動で最適化するのが機械学習だし。でもまぁ、ここまで辿り着くのは思ったよりずっと早かった。素人でもやってみるもんだな。ここまで技術は簡単でフレンドリーになってるってね。
2023/11/04 20:58:47







