

 into the wall
into the wall
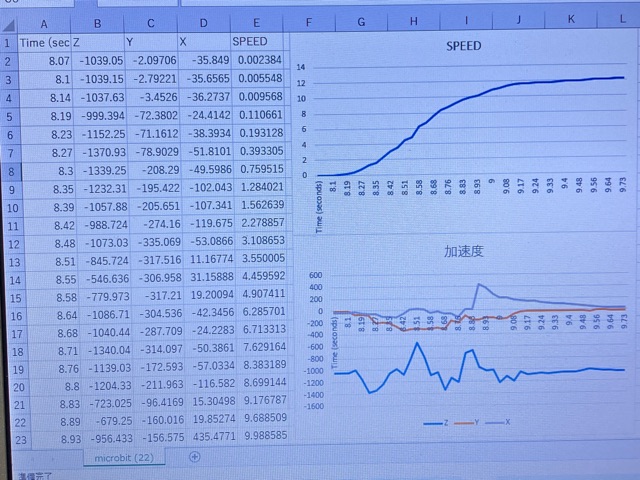
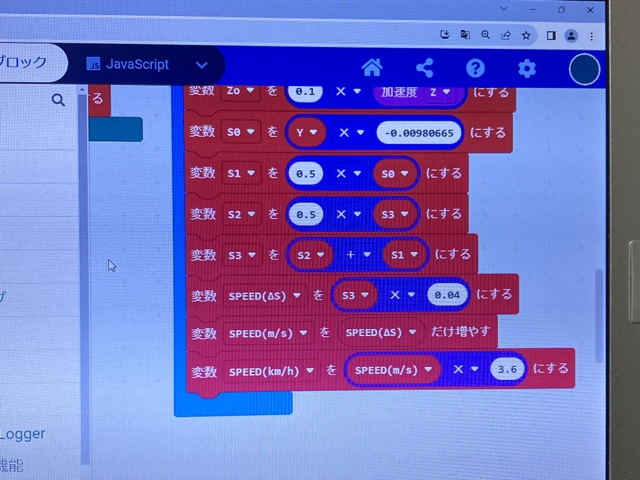


(これでかれこれ20数回目のトライ...。ミニ四駆の良さはセッティング変更もトライも手が早い事であるが...。) ・アラー?スピードも上手く計測できるようになった? _:(´ཀ`」 ∠): XとY軸のフィルター係数を0.95まで絞った結果がコレだが、急減速には追従しなくなった。0.9に戻すと変な振動拾うし、どうにもならんな。とは言えこれぐらい係数絞ったら数値は安定して12km/hぐらいに取れるようになった、直線2m間でだ。 ・コーディングはどうやった訳?( ・∇・) 変数S0をY×-0.009.80665にする 変数S1を0.5×S0にする 変数S2を0.5×S3にする 変数S3をS2+S1にする speed(ΔS)をS3×0.04にする speed(m/s)をspeed(ΔS)だけ増やす speed(km/h)をspeed(m/s)×3.6にする で台形積分と同じになるな。因みに変数Yは加速度Yをローパスフィルターで補正した値だし、マイクロビットを進行方向とは逆向きに取り付けているから、重力加速度/1000をマイナスにしてる。タイムスタンプΔtのインターバルも0.03〜0.05秒ぐらいで安定してなくて、0.04はあくまで平均値だったりするけれど。 ・よくもまぁ、マイクロビットだけでここまでやるわね ( ̄▽ ̄) そうかもしれない。マイクロビットでこの辺の情報は少なくて苦労したな。まぁ、小中学生向けの教材の割にはちょっと難しいが、とはいえアルディウーノやラズベリーパイは専門的過ぎるし、中間難易度が無いっていうか。でもこれぐらいなら工夫次第でなんとかなるレベルだし、プログラミングの知識が無くても大丈夫なのが凄いな。 ・ポイントとしては加速度センサーの値にローパスフィルター(RCフィルター)を適用して必要なデータを抽出するのと、Y軸の値を定積分して速度を求める事。この辺が基本的なプログラムになってくるのよね。 ちょっとややこしいもしれんが、是非ともトライして欲しい。たんに少年漫画の設定だったムリ目なマシンだって最新技術できっと蘇るから。 ・...。ワタシたち、何やってるんですかねぇー _:(´ཀ`」 ∠): 何言ってるんだい?ミニ四駆だよ。
2023/10/18 20:01:19







